Note
Mention of companies does not imply recommendation or endorsement by MU over other companies not mentioned.
GPS technology
Global Positioning System (GPS) receivers provide a method for determining location anywhere on the earth. Accurate, automated position tracking with GPS receivers allows farmers and agricultural service providers to automatically record data and apply variable rates of inputs to smaller areas within larger fields.
A GPS receiver can be compared with a simple AM or FM radio. A GPS receiver "listens" for the signals that are broadcast from the satellites of the United States Department of Defense (DOD) Global Positioning System. Orbiting around the earth at an altitude of 12,550 miles, these satellites are in predictable locations; hence, we refer to the system of satellites as the GPS constellation.
Each satellite broadcasts almanac information containing the position of all satellites in the constellation. GPS receivers use the almanac to determine the position of the satellites. Minor variations in the orbits of the satellites occur due to gravitational forces from the sun and the moon. The DOD continuously monitors the satellites and adjusts the almanac information to represent the actual orbits of the satellites.
The broadcast signals also contain a precisely timed predictable code that a GPS receiver can use to determine how long the signal required to reach the receiver. A microprocessor within a GPS receiver uses these delays and the position of the satellite to calculate the distance to each satellite, and then uses this information to determine location through triangulation.
Triangulation is a mathematical method for locating points on a plane in three-dimensional space. If the distances to each of three satellites and your approximate location on the earth are known, the GPS receiver can calculate its terrestrial position. If information from four satellites is available, elevation can also be determined.
Range determination factors
Each GPS satellite continuously broadcasts two radio signals on separate L-band frequencies (the L-band is from 1,000 to 2,000 MHz). The L1 signal (transmitted at 1575.42 MHz) carries two codes, a Coarse/Acquisition (C/A) code and a Precision (P) code. The L2 signal (transmitted at 1227.60 MHz) carries only the P code, which is encrypted so only the military and other "authorized" receivers can interpret it. The use of both the L1 and L2 signals and their P codes produces what is called the Precise Positioning Service (PPS) and is available to the U.S. and allied military, U.S. government agencies and authorized civilian users. The system available for all civilian use accesses only the L1 signal and the C/A code and is known as the Standard Positioning Service.
Accuracy
The accuracy obtained generally depends on five factors.
- Proper installation
- The degree of technology used in the receiver
- The number and location of satellites
- Errors introduced by selective availability (SA), atmospheric conditions, the troposphere, the ionosphere, and multipathing — radio signals bouncing off objects in the area
- Differential corrections.
Installation
GPS antennas should be mounted on the centerline of a combine, tractor or truck and above any part of the machinery that might obstruct a line of sight to a satellite. If the cab is centered and the top of the cab is above other portions of the machine, a cab-top mounting may be the best location. However, on a steep side slope, a high mounting point will result in an error in position calculation due to the offset in horizontal position.
GPS and DGPS receivers may have separate antennas but usually there will be a combination antenna so that both are centered at the same location.
A delay of several seconds often occurs in agricultural applications such as yield monitoring, spraying and fertilizer application.
Example
If the antenna on a sprayer traveling 10 mph is mounted 30 feet ahead of the booms and a rate change at the controller is effected at the boom two seconds later, the rate change will occur when the booms reach the location of the antenna where the change was made. At any other ground speed, the rate change at the booms will not occur at the same location as the controller. A time adjustment must usually be factored into the system to compensate for time delays in sensing or product application.
Electrical interference can result from electrical storms, power lines, 2-way radios, nearby radio transmitters, electric motors, microwave towers, cellular phones, vehicular electrical equipment such as alternators and ignition systems on spark-ignition engines, and other sources. Changing the position of the antenna or adding noise suppression kits may reduce interference problems from alternators and ignition systems. Follow the instructions for installation of the GPS equipment, making sure that all connections are tight.
Technology
Low-cost receivers receive signals from one satellite at a time and require more time to determine the location than a receiver capable of receiving four signals simultaneously. Usually, seven to 10 satellites are in view at any one time and more sophisticated receivers will produce the most accurate location.
Reacquisition time is the time it takes to get an accurate position fix after a short-time loss of satellite signals; this may occur for a variety of reasons, including traveling near trees or buildings and losing the 'line of sight' to satellites. Reacquisition time is important for most agricultural applications and, especially, for guidance with applicators and aircraft. New technology in GPS receivers has shortened reacquisition time. Receivers that can track 8 to 12 satellites are less susceptible to acquisition loss.
Satellite constellations
Using triangulation to calculate position, small errors in distance can cause large errors in position. The error in calculating position through triangulation increases when the satellites are close together. The best accuracy is produced when the receiver can pick up signals from many widely dispersed satellites (Figure 1).
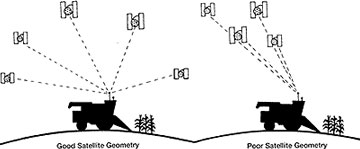 Figure 1
Figure 1
Good satellite geometry (widely and evenly spaced satellites) yields more accurate GPS position estimates.
*Deere and Company©
Selective availability and other errors
To prevent an enemy from using GPS satellite signals for determining locations on earth, the DOD "scrambles" the signals sufficiently to introduce an error of about 100 meters in an uncorrected location calculation. The term for this is "selective availability" (SA). Atmospheric, tropospheric and ionospheric conditions, however, also cause distortions or errors in calculating distance; natural errors due to these conditions are not easily or reliably predicted. Hence, even in the absence of SA, differential corrections will still be required to accurately calculate position.
Multipathing, the phenomenon that creates distorted television signals is caused by signals that bounce off of other objects before reaching the antenna (Figure 2). Multipathing cannot be corrected by differential corrections.
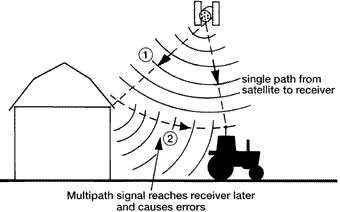 Figure 2
Figure 2
GPS signals can sometimes "bounce" off of objects in their path and cause the signal to reach the receiver on a different path. This is called multipath error.
*Deere and Company ©
Differential corrections
Stationary GPS receivers are used to calculate the total error due to SA, variable atmospheric conditions and other factors. The concept is simple. A stationary receiver always has a known location; because the actual positions of the satellite and the receiver are known, the true range (distance) is known. The distance calculated by the receiver using the broadcast signals is known as the pseudorange, which is generally in error due to the combined sources of all errors. The difference between the true range and the pseudorange is the error and is known as the differential correction (Figure 3).
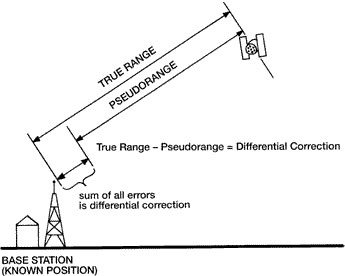 Figure 3
Figure 3
A stationary receiver (base station) measures its distance from each satellite (pseudorange) and then calculates the error. This error is called the differential correction.
*Deere and Company ©
Differential correction data can be purchased and used at a later time in a process known as post processing to correct the errors in recorded data. However, the most common approach is to connect a differential corrections receiver to a GPS receiver to provide real-time corrections (Figure 4).
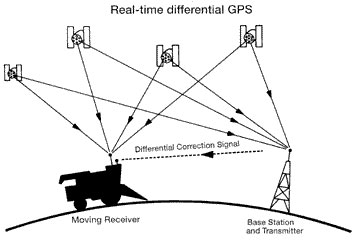 Figure 4
Figure 4
In real-time DGPS, the stationary receiver transmits the differential correction to the moving receiver via another radio signal.
*Deere and Company ©
Many units incorporate GPS receivers and differential corrections receivers into the same unit. These are often referred to as differentially-corrected GPS (DGPS) receivers. Differential corrections signals are available from the Coast Guard or Army Corps of Engineers and through commercial sources, which, for a fee, will provide signals from a satellite or a land-based tower. Where these sources aren't available, or for special applications, a private differential corrections source can be installed.
Some of the newer DGPS receivers combine the capability of receiving differential signals from both the Coast Guard beacons and from a satellite service. Refer to Table 1 for a comparison of features of Coast Guard and satellite-based differential corrections sources.
Table 1. Comparison of Coast Guard and satellite differential correction sources by feature.
| Feature | Coast Guard beacon | Satellite Differential |
|---|---|---|
| Accuracy (RMS) | <1 m (depends on distance from area beacon station) | <0.75 m uniform over service — depends on service provider |
| Initial equipment cost | lower initial cost | higher initial cost |
| Annual subscription cost | none in USA but signal not available in many regions of the US | $500 to $1000 per year, depending on level of service |
| Interference susceptibility | subject to local man-made noise sources | minimal interference from man-made sources |
| Range | 100 to 250 miles | large coverage area — most of US |
Coast Guard signals
The Coast Guard signals are broadcast in the frequency range of 285 to 325 kHz (just below the usual AM-radio band) where radio waves travel as ground waves and are not limited to line-of-sight reception like FM-radio stations.
The signals are series of pulses similar to those of the GPS satellites. Referred to as Minimum Shift Keying modulation, the signal is less sensitive to electrical interference and noise than AM-radios.
Missouri has free access to correction signals from Coast Guard beacons located near St. Louis (@ 322 KHz), Kansas City (@ 305 KHz), Tulsa (@ 299 KHz), Rock Island (@ 311 KHz), Memphis (@ 310 KHz) and Omaha (@298 KHz).
The range of the Coast Guard beacons is approximately 150 miles in good weather (electrical storms cause interference). Accuracy decreases with distance from the transmitter. This service is expected to become the choice of many agricultural users, especially in Missouri where several signals are available.
A disadvantage of the Coast Guard differential corrections signal is the rate at which the beacon transmits or repeats messages. Most Coast Guard sites broadcast at 200 bits per second. At this broadcast rate, the age of a satellite's differential correction can be as old as four seconds. For some applications, such as guidance, this update rate may be unacceptable. For guidance applications, update rates of two to ten times per second may be required.
Typical Coast Guard beacon receivers have two channels. One channel receives the differential correction and the other is searching for the best incoming signal. This helps to ensure against loss of a DGPS signal if at least two beacons are within range.
Satellite-based correction signals
For the user, one of the simplest types of differential corrections signals is transmitted from a geostationary satellite. Companies such as Omnistar, Accqpoint and Racal provide this service.
The typical annual user's fee ranges from $500 to $800. The correction signal is available throughout most of North America. The accuracy of high quality receivers is generally considered to range from one to three meters RMS. Interference from man-made sources is minimal.
Satellite-based signals may have an advantage for operation around trees and buildings since the satellite is nearly overhead at most locations and within the DGPS receiver's line-of-sight.
Land-based correction signals
Several commercial land-based correction signal services are also available for a fee. Some companies put up their own transmitters to broadcast correction signals; these include SatLoc, Mobile Data and CSI.
Some commercial service providers piggyback correction signals onto commercial FM radio station transmitters. These sub-carriers include Pinpoint Communications, DCI and others.
Private GPS receiver and radio transmitter
GPS users not covered by Coast Guard or commercial sources of differential corrections can install a stationary receiver and transmitter to provide their own differential corrections source. Few users in Missouri will choose to buy and install their own fixed GPS receiver and transmitter since the Midwest has other choices available.
Cost vs. accuracy
The accuracy attainable with GPS depends partly on how much you are willing to spend, ranging from approximately $100 to $100,000. A low-cost (from $100 to $500) GPS receiver without DGPS capability may be sufficiently accurate for some crop scouting applications, for navigating highways or for locating your favorite fishing spot on a lake. The RMS horizontal accuracy may be about 50 yards.
The cost for a basic DGPS receiver suitable for most agricultural applications is about $3,000 to $5,000 and provides RMS accuracy of at least three meters with a typical accuracy of one meter, which is sufficient for yield monitoring and grid soil sampling.
If you need a GPS receiver for guidance (for spraying, fertilizer application, etc.), the cost may be up to $25,000. Such systems provide accuracy down to a few inches. Since sprayers and fertilizer spreaders can travel fairly quickly, lower quality GPS equipment may not update position quickly enough to be used for guidance or control, although GPS systems with high update rates and accuracies in the range of one foot or less are becoming available at lower prices.
The annual subscription cost for some differential correction services varies with the level of service (accuracy). Some providers offer three levels of service, e.g., one provider has a premium service for better than 1 meter accuracy, intermediate service for accuracies in the range of 5 meters and a basic service for accuracies in the range of 10 meters. Typical approximate costs may be $600, $250 and $75 per year, respectively, depending on the level of service.
Accuracy of GPS units
Accuracy of GPS units may be stated in a variety of statistical terms, which one is used may not be specified. Most statistical definitions of GPS accuracy assume that position errors are random in nature and follow a normal distribution. One measure of accuracy is the Circular Error Probable (CEP). This term applies to horizontal position estimates. A CEP of 1 meter is interpreted to mean that 50 percent of the position estimates will be within 1 meter of the actual position; the other 50 percent can be anywhere in the universe.
Two frequently used accuracy terms are the RMS (also known as one sigma) and 2DRMS (also known as two sigma). The acronym RMS stands for root mean square and is approximately equal to the standard deviation (SD). If the calculated positions were normally distributed about the true position, then 68 percent of the computed positions would be within +/- one standard deviation and 95 percent would be within +/- two SD's of the true position (2DRMS).
When comparing the accuracy of GPS units, make sure that the accuracies are specified in the same terms (CEP, RMS or 2 DRMS).
Coordinate systems
Several coordinate systems are in use for mapping and may cause problems with compatibility between software systems. Users frequently need to transform position data into a plane (flat) coordinate system, either to merge them with another data set, to plot a map of the GPS results, or to perform further calculations for such parameters as area, distance or direction (plane coordinate systems are usually easier to work with than geodetic coordinates). When using data and maps from several sources, coordinates must be based on the same datum. The coordinate system differences, which are caused by a different reference frame, ellipsoid and data adjustment, are significant (up to several hundred meters) and cannot be ignored.
Several commercially-available software programs produced by well-known GIS vendors treat the coordinate shifts incorrectly. The National Geodetic Survey provides software (LEFTI and NADCON) at a nominal charge to compute datum shifts. Boundary coordinates on older paper copies of soil maps should be converted to the preferred datum (probably WGS84) before they are digitized.
GPS receivers can usually report position information in more than one format. The most common format is lat/lon (latitude and longitude). Lat/lon coordinates are recorded in angular units of degrees, minutes and seconds. One second of latitude is equal to about 30 meters. GPS receivers may display lat/lon in degrees plus minutes to four decimal places (instead of minutes and seconds). Most geographic information system (GIS) software is capable of using more than one format and may automatically convert lat/lon coordinates to a coordinate system such as Universal Transverse Mercator (UTM) or State Plane Coordinates (SPC) to calculate distances in meters or feet.
UTM and SPC systems project portions of the earth's curved surface onto a flat map and report locations as actual distances from a reference point in meters and feet, respectively. Hence, no conversions are necessary to calculate distance or area.
Commercial software available from several GPS vendors will compute UTM or state plane coordinates from GPS data. These coordinates are usually based on the WGS-84 datum and thus are in the NAD-83 system. If these must be transformed to NAD-27, it is advisable to do the NAD-83 to NAD-27 transformation in geodetic coordinates, and then make the conversion to plane coordinates as the final step.
Universal Transverse Mercator Coordinates
The UTM coordinate system is a worldwide system originally adopted by the U.S. military in 1947, and since has been widely used by civilian mapping in many countries. The UTM system is consistent throughout the world and one set of equations will allow calculation of coordinates at any location. The world is divided into 60 zones each spanning 6 degrees in longitude and extending north and south from a latitude of south 84
State plane coordinate system
In the 1930s, the U.S. Coast and Geodetic Survey established a plane coordinate system for each of the 48 states. One to five zones were established in each state with a Lambert Conformal or a Traverse Mercator projection. The specific projection and the size of the zone was selected to fit the geometry of the state and to keep distortions at or below one part in 10,000.
Summary
Together, the Global Positioning System and GPS receivers provide the means for determining position anywhere on the earth. Developed by the U.S. DOD and used for many purposes, GPS has also made precision farming a reality. A typical configuration for on-farm agricultural applications includes a GPS receiver and antenna, a differential corrections receiver and antenna, and cables to interface differentially-corrected GPS data from the receiver to other electronic equipment such as a yield monitor or a variable rate controller.
GPS can provide accurate position data when installed and operated properly, but can produce false readings under poor conditions. Use similar statistical measures for comparing the performance characteristics of various receivers. Few, if any, receivers will provide accurate position estimates 100 percent of the time. Even in the absence of intentional dithering of signals known as selective availability (SA), differential corrections receivers are necessary to account for other sources of error to provide the accuracy required for precision farming.
Glossary
- Anywhere fix
The ability of a receiver to start position calculations without being given an approximate location and approximate time. - Bandwidth
The range of frequencies in a signal. - C/A code
The standard (Coarse/Acquisition) GPS code. A sequence of 1023 pseudo-random, binary, biphase modulations on the GPS carrier at a chip rate of 1.023 Mhz. Also known as the "civilian code". - Carrier
A signal that can be varied from a known reference by modulation. - Carrier frequency
The frequency of the unmodulated fundamental output of a radio transmitter. - Carrier phase GPS
GPS measurements based on the L1 or L2 carrier signal. - Channel
A channel of a GPS receiver consisting of the circuitry necessary to receive the signal from single GPS satellite. - Clock bias
The difference between the clock's indicated time and true universal time. - Code phase GPS
GPS measurements based on the pseudo-random code (C/A or P) as opposed to the carrier of that code. - Control segment
A world-wide network of GPS monitor and control stations that ensure the accuracy of satellite positions and their clocks. - Differential positioning
Accurate measurement of the relative positions of two receivers tracking the same GPS signals. - Dilution of precision
The multiplicative factor that modifies ranging error. It is caused solely by the geometry between the user and his set of satellites. Known as DOP or GDOP. - Dithering
The introduction of digital noise. This is the process the DOD uses to add inaccuracy to GPS signals to induce Selective Availability. - Ephemeris
The predictions of current satellite position that are transmitted to the user in the data message. - Geometric Dilution of Precision (GDOP)
See Dilution of Precision. - Ionosphere
The band of charged particles 80 to 120 miles above the earth's surface. - Ionospheric refraction
The change in the propagation speed of a signal as it passes through the ionosphere. - L-band
The group of radio frequencies extending from 1000 MHz to 2000 MHz. The GPS carrier frequencies (1227.6 MHz and 1575.42 MHz) are in the L band. - Meter
a metric measure of length equal to 3.28 feet. - Multipath error
Errors caused by the interference of a signal that has reached the receiver antenna by two or more different paths. Usually caused by one path being bounced or reflected. - Multi-channel receiver
A GPS receiver that can simultaneously track more than one satellite signal. - Multiplexing channel
A channel of a GPS receiver that can be sequenced through a number of satellite signals. - P-code
The Precise code. A very long sequence of pseudo-random binary, biphase modulations on the GPS carrier at a chip rate of 10.23 MHz which repeats about every 267 days. Each one-week segment of this code is unique to one GPS satellite and is reset each week. - Precise Positioning Service (PPS)
The most accurate dynamic positioning possible with standard GPS, based on the dual frequency P-code and no SA. - Pseudo random code
A signal with random noise-like properties. It is a very complicated but repeating pattern of 1's and 0's. - Pseudorange
A distance measurement based on the correlation of a satellite transmitted code and the local receiver's reference code, that has not been corrected for errors in synchronization between the transmitter's clock and the receiver's clock. - Satellite constellation
The arrangement in space of a set of satellites. - Selective Availability (SA)
A policy adopted by the Department of Defense to introduce some intentional clock noise into the GPS satellite signals thereby degrading their accuracy for civilian users. - Standard Positioning Service (SPS)
The normal civilian positioning accuracy obtained by using the single frequency C/A code. - Static positioning
Location determination when the receiver's antenna is presumed to be stationary on the earth. This allows the use of various averaging techniques that improve accuracy by factors of over 1,000.
References
- GPS: A Guide to the Next Utility. 1993. Trimble Navigation Ltd., P.O. Box 3642, Sunnyvale, Calif. 94088-3642.
- Differential GPS Explained. 1996. Trimble Navigation Ltd., P.O. Box 3642, Sunnyvale, Calif 94088-3642.
- The Precision-Farming Guide for Agriculturalists. 1997. John Deere Publishing , Dept. 374, John Deere Road, Moline, Ill. 61265-8098. 800-522-7448.
- The State of Site-Specific Management or Agriculture. 1997. Published by: the American Society of Agronomy, Inc.; the Crop Science Society of American, Inc.; and the Soil Science Society of American, Inc.
- Target Farming: A Practical Guide to Precision Farming Concepts and Technology. 1996. Written and published by Ron Johnson, A.Sc.T., 511 Haslam Cres., Saskatoon, Sask S7S 1E7 Canada, Phone and Fax: 306-665-1610